
株式会社スマートリンク北海道
-耕起・整地-
2025年度
検証の目的
・耕起・整地作業の無⼈⾃動⾛⾏実証を⾏い、労働時間の削減効果を検証する。
・⼤区画圃場及び傾斜耕地におけるロボット農機の効率的運⽤のため、リモコン電波の通信状況を確認する。
・ロボット農機使⽤の上で適正な農地整備に向けた課題抽出と提⾔を⾏う。
検証の内容
<作業・栽培の条件と条件設定の考え⽅>
①労働時間の削減効果の検証
・同じ作物圃場・作業で同時期に使⽤機械・使⽤作業機のみ異なる条件で作業時間を計測する。

②リモコン電波の通信状況確認
・ロボットトラクタを圃場内、農道に配置し、(a)同⼀圃場内での通信確認、(b)同⼀傾斜にある圃場間での通信確認、(c)隣接傾斜にある圃場間での通信確認の 3 つのパターンでリモコン電波が到達するかを確認する(図1)。
・電波の到達については、メーカーからは⽔平距離で 250m 程度の到達距離であるとされている。本検証
では、傾斜地に圃場が位置することから、リモコンで動作開始指⽰を⾏った際にロボットトラクタが稼働開始
されるか判断を⾏う。

③ロボット農機使⽤の上で適正な農地整備に向けた課題抽出と提⾔
・ロボットトラクタによる各傾斜圃場での作業時間、⾛⾏軌跡から、ティーチング(ロボット農機に区画形状を記憶させる外周⾛⾏)にかかる時間や旋回数、⾃動⾛⾏中の停⽌位置・回数・時間を確認し、区画規模や区画形状の妥当性を検証する。
・農道⾛⾏時の⾛⾏軌跡をもとに、⽤排⽔施設や路肩からの距離を確認し、安全に⾛⾏できる施設設計となっているかを検証する。
進捗・達成状況
①労働時間削減効果の検証
①-1.慣⾏区の既存農機による作業時間とロボットトラクタ利⽤による有⼈作業時間を⽐較
・春まき⼩⻨後の耕起作業にてロボットトラクタと既存トラクタの隣接圃場作業を実施。
・⾺⼒、作業機種・幅の相違から単純⽐較すると慣⾏区の作業性が⾼くなった(表 1)。そのため、「農業機械導⼊計画策定の⼿引き(北海道)」を参考に、理論作業量、実作業量、作業効率を求め、慣⾏区のロボットトラクタの作業量換算を⾏い、⽐較実施した(図 2)。
・図 3 に⽰す計算式を⽤いて、慣⾏区の⼤区画、⼩区画の使⽤農機、作業情報から作業効率を求め、ロボットトラクタ理論作業量を乗じて、ロボットトラクタ利⽤を想定した実作業量、作業時間を算出した。
・⼤区画では約 58%、⼩区画では約 71%の有⼈作業時間削減となることが試算された。

①-2.既存農機の作業時間から⼤区画と⼩区画での作業性を⽐較
・本年度は、ロボットトラクタ導⼊時期が 7 ⽉となったため、春作業については、既存トラクタにて⼤区画、⼩区画圃場での計測を⾏った。
・⼩区画圃場で計測した作業時間を⼤区画圃場⾯積相当で算出し、⼤区画圃場単独で計測する作業時間との差異を⽐較した(図 4)。
・⼤区画では⼩区画に⽐べ 7〜45%の作業性向上が確認された。
・春まき⼩⻨で⼩区画の作業時間が短い圃場については、圃場の環境(⼟壌の乾燥具合)から作業速度が他の圃場と⽐べて早いため(5km/h、他圃場 3.5〜4km/h)。

①-3.既存農機およびロボットトラクタ利⽤による作業時間から⼤区画と⼩区画での作業性を⽐較
・⼤区画と⼩区画での作業効率⽐較おいて、⼤区画では⼩区画に⽐べ既存トラクタで約 31.5%、ロボットトラクタで約 13.5%の向上となった(図 5)。

①-4.⽣産⼯程に係る単位⾯積当たりの労働時間
・⽣産⼯程に係る単位⾯積当たりの労働時間について、⽣産者からのヒアリングによる使⽤機械から「北海道⽣産技術体系第6版」の作業機械効率を⽤いて、単位⾯積当たりの作業時間を求め、「技術体系」としてまとめた。
・また、本年度実測した⼯程の作業時間を⼤区画・⼩区画の検証区・慣⾏区に適⽤し、各区分での労働時間を算出した(表 2)。
・本年度は、機械導⼊の遅れから⼀部を除き、検証区においても従来農機での作業時間となっている。
・無代かき移植⽔稲では、⼤区画・慣⾏区のほぼ全⾯積で倒伏があったため、収穫作業時間が増加し、⼩区画よりも労働時間が多くなった。
・湛⽔直播⽔稲は、代かき・収穫作業において、「技術体系」よりも労働時間が増加しており、全区分の合計労働時間が「技術体系」よりも多くなった。
・⼤⾖では、各区分において「技術体系」より労働時間が少なくなっており、ロボットコンバイン(代替機︓⾃動アシストコンバイン)を利⽤した⼤区画・検証区の労働時間が最も削減された。
・春まき⼩⻨では、ロボットトラクタを利⽤した⼤区画・検証区の労働時間が他の区分に⽐べて最も少なくなっており、「技術体系」の労働時間よりも減少した。

②リモコン電波の通信状況確認
・10⽉31⽇に平農場にて実施。
・ロボットトラクタとリモコンの距離については、ドローンの機体と送信機を利⽤し、位置情報を把握の上、GISにポイントを落としてその距離を計測した。
(a)同⼀圃場内での通信確認
・ロボットトラクタを配置した箇所から圃場の⻑辺⽅向の2箇所(直線上と対⾓線上)でリモコン操作を⾏い通信状況の確認を⾏った(図6)。
・下図の A 点、B 点いずれにおいてもロボットトラクタとの通信を⾏うことができた。ロボットトラクタ配置位置と通信確認実施点の距離及び通信状況は(表3)のとおりである。

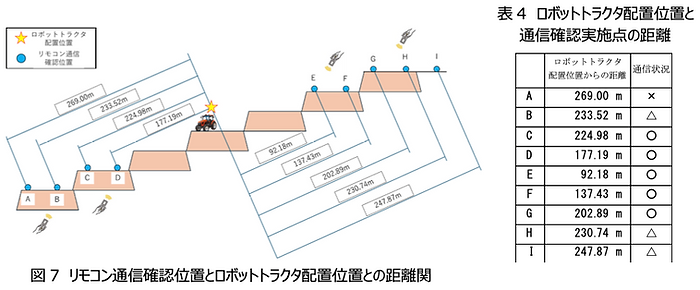
(b)同⼀傾斜にある圃場間での通信確認
・ロボットトラクタ配置した箇所から同⼀縁において、傾斜の上下にある圃場位置で順にリモコン操作を⾏い通信状況の確認を⾏った。
・図 7 に⽰す A 点においてはリモコン操作でのロボットトラクタの動作が確認できなかった。また、B 点、H点、I 点においては、リモコンの向きによってロボットトラクタが動作する場合としない場合を確認した(リモコンを上向きにした状態で操作するとロボットトラクタが感知)。
・⽬視でロボットトラクタが確認できる場合で、リモコンとロボットトラクタの距離がメーカー推奨値内であることが稼働条件であると考えられる。
・ロボットトラクタ配置位置と通信確認実施点の距離及び通信状況は(表 4)のとおり。
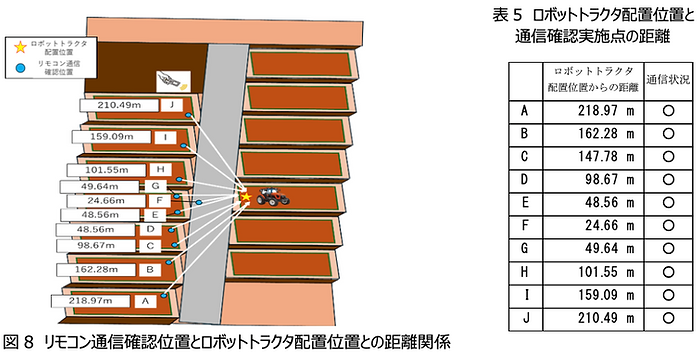
(c)隣接傾斜にある圃場間での通信確認
・ロボットトラクタを配置した箇所に傾斜を伴い隣接する圃場において、リモコン操作を⾏い通信状況の確認を⾏った。(図 8)のいずれにおいてもロボットトラクタとの通信を⾏うことができた。これは、(b)の結果と同様にロボットトラクタがリモコン利⽤メーカー推奨値内で、ロボットトラクタが⽬視可能な範囲であることと⼀致している。
・ロボットトラクタ配置位置と通信確認実施点の距離及び通信状況は(表 5)のとおり。
③ロボット農機使⽤の上で適正な農地整備に向けた課題抽出と提⾔
・R7 年度はロボットトラクタの導⼊が遅れたため春作業での利⽤ができず、収穫後の耕起作業は⾬天のため⼟壌状態が悪く、検証圃場である 56 農区でロボットトラクタを⽤いた耕起作業ができなかった。そのため、無⼈⾃動⾛⾏実証による課題を抽出できなかった。
・そこで、設計図⾯をもとに、適正な農地整備に向けた課題の抽出を⾏った。
・圃場区画については、旭東地区の標準区画は、⻑辺 90m×短辺 40m の圃場 7 つを 1 つにし、⻑辺255m×短辺 88m の圃場に整備する計画である(図9)。
・ただし、⼀部の傾斜圃場では、⼟⼯量、地形、家屋等を考慮して整備するため、図 10 に⽰すような区画形状で整備される場合があり、標準区画と⽐較するとロボットトラクタの作業効率が低下することが想定される。
・無⼈⾃動⾛⾏実証では、標準区画とそれ以外の区画での作業効率について⽐較検証し、ロボット農機の作業効率を考慮した区画整備⽅法を提案する。

・圃場に整備される施設の配置や構造については、ロボットトラクタの作業に⽀障をきたす恐れがある施設を設計図⾯上から抽出した。
・実証試験圃場の⽤⽔はパイプラインで供給されており、圃場短辺側の農道に給⽔設備が配置されている(図 11)。
・この給⽔施設は、圃場内の突起物となっており、ロボットトラクタ作業時に安全センサーが反応して作業の妨げになる可能性がある(図 12)。
・実証試験では、給⽔施設近辺での作業状況をモニタリングし、⽀障の有無、改善の要否を検証する。

・農道については、配置と幅員について、現⾏設計の課題を抽出した。
・現⾏設計の標準区画内の農道は、⽀線農道 B(幅員 5m)および⽀線農道 C(幅員 4m)を整備する計画である(図 13)。
・⽀線農道 B は⼿動運転の⼤型コンバイン⾛⾏が可能な幅員としており、⽀線農道 C は軽トラックのすれ違い⾛⾏が可能な幅員としている。この場合、コンバインは既設道路を⾛⾏しなければ、すべての圃場の収穫ができない(図 14)。
・⾃動⾛⾏農機が安全に⾛⾏するためには、既設道路を⾛⾏しないで農区内の⾛⾏のみで作業を完結できることが望ましい。そのためには、⻑辺側の⽀線農道 C の⼀部区間の幅員を 5m に変更することで、農区内の⾛⾏のみで収穫作業が可能となる。
・なお、ここではコンバインの⾞両幅員から⽀線農道 B の幅員を設定しているが、ロボットトラクタの⾛⾏を考える場合、牽引するインプルメントが⼤型化しており、例えば代かき⽤ハローの全幅は 4.2m であるため、コンバイン⾛⾏と同程度の農道幅員が必要である。

次年度の計画案
①労働時間削減効果の検証
・本年度はロボットトラクタの導⼊が遅れ、春作業での利⽤が出来なかった。また、収穫後の耕起作業について、⾬天のため、圃場の⼟壌状態が悪く、農機が圃場に⼊ることが出来なかった。
・次年度は、⽔稲、⼤⾖の春耕起・整地作業よりロボットトラクタを利⽤しての計測を⾏う。また、慣⾏区においては、ロボットトラクタの有⼈作業を実施することで同⼀規格での⽐較を⾏うこととする。
・次年度、秋まき⼩⻨(⼤⾖間作)収穫後の圃場にて、⽬視監視(Lv2)と遠隔監視(Lv3)の圃場内作業時間を⽐較して、労働時間削減効果の検証を⾏う予定である。
③ロボット農機使⽤の上で適正な農地整備に向けた課題抽出と提⾔を⾏う。
・傾斜地の区画規模や⽤排⽔施設については、区画の違いがロボット農機の作業能率にどの程度影響するのか、無⼈⾃動⾛⾏実証により⾛⾏軌跡等を確認するとともに、給⽔設備の実際の整備状況を把握し、農機の⾛⾏への影響を確認する予定である。
・ロボット農機に適した区画形状や農道の幅員については、シミュレーション等により農道⾛⾏の安全性を確認する予定である(図 15)。
